I am a Research Scientist with Sony AI working on Reinforcement Learning for development of complex autonomous agents.
Previously, I was a doctoral and also a post-doctoral researcher with the Dynamic Robot Systems group, Oxford Robotics Institute, University of Oxford. I was also part of the Autonomous Intelligence Machines and Systems programme at Oxford.
I am a recipient of the Queen Mary UK Best PhD in Robotics Award for my doctoral research in Robotics and Artificial Intelligence.
As an undergraduate, I studied Electronics Engineering at the University of Mumbai.
October 2017 - November 2021
Autonomous Intelligent Machines and Systems
Research:
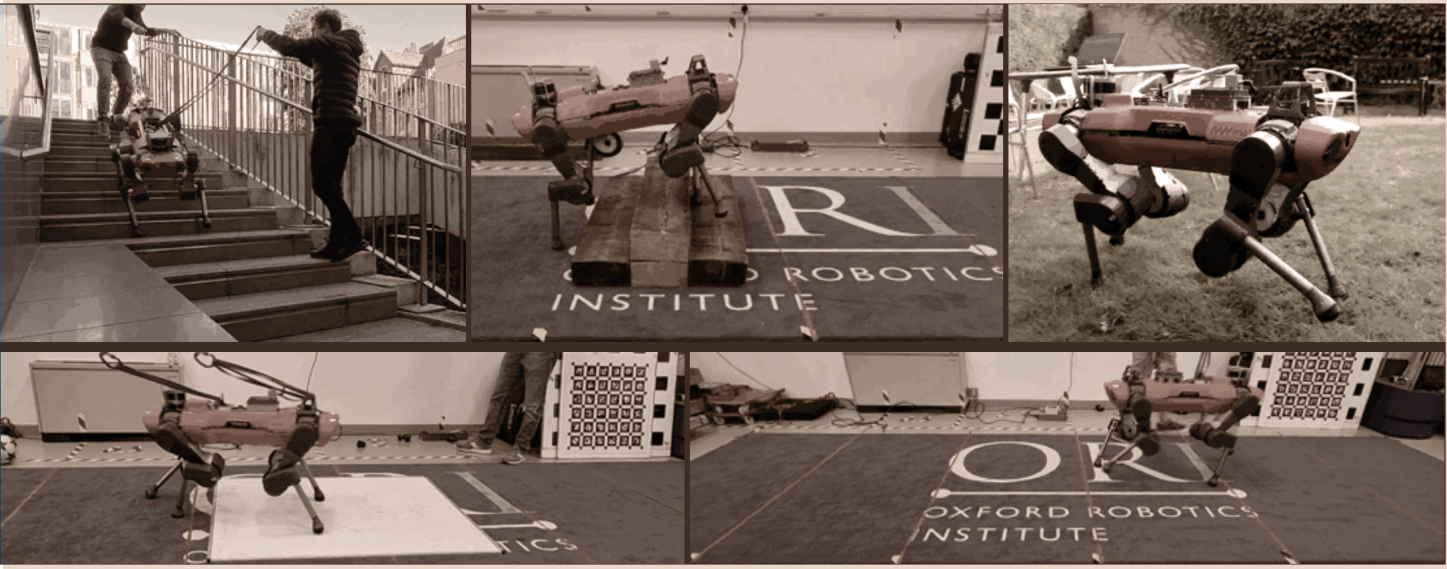
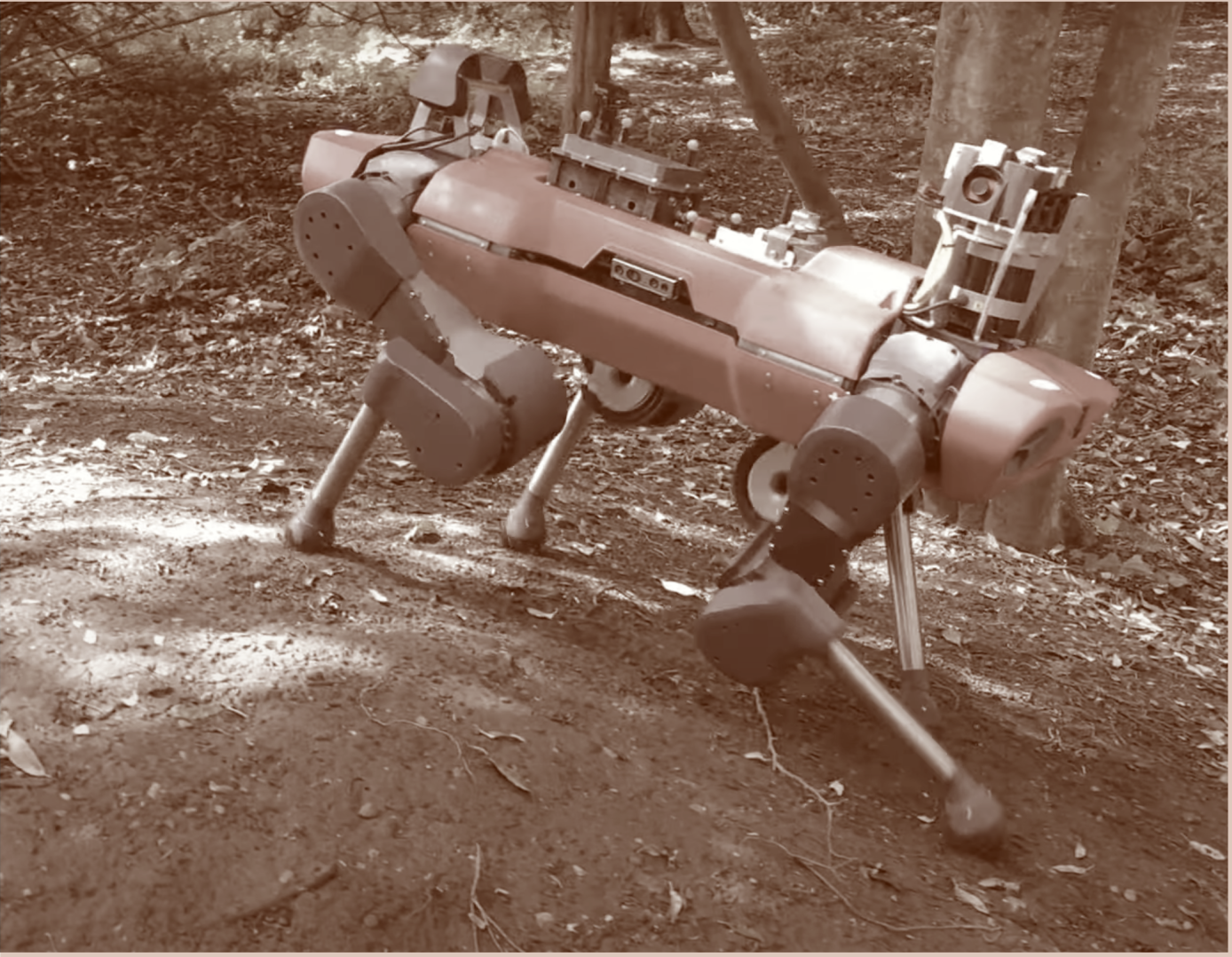
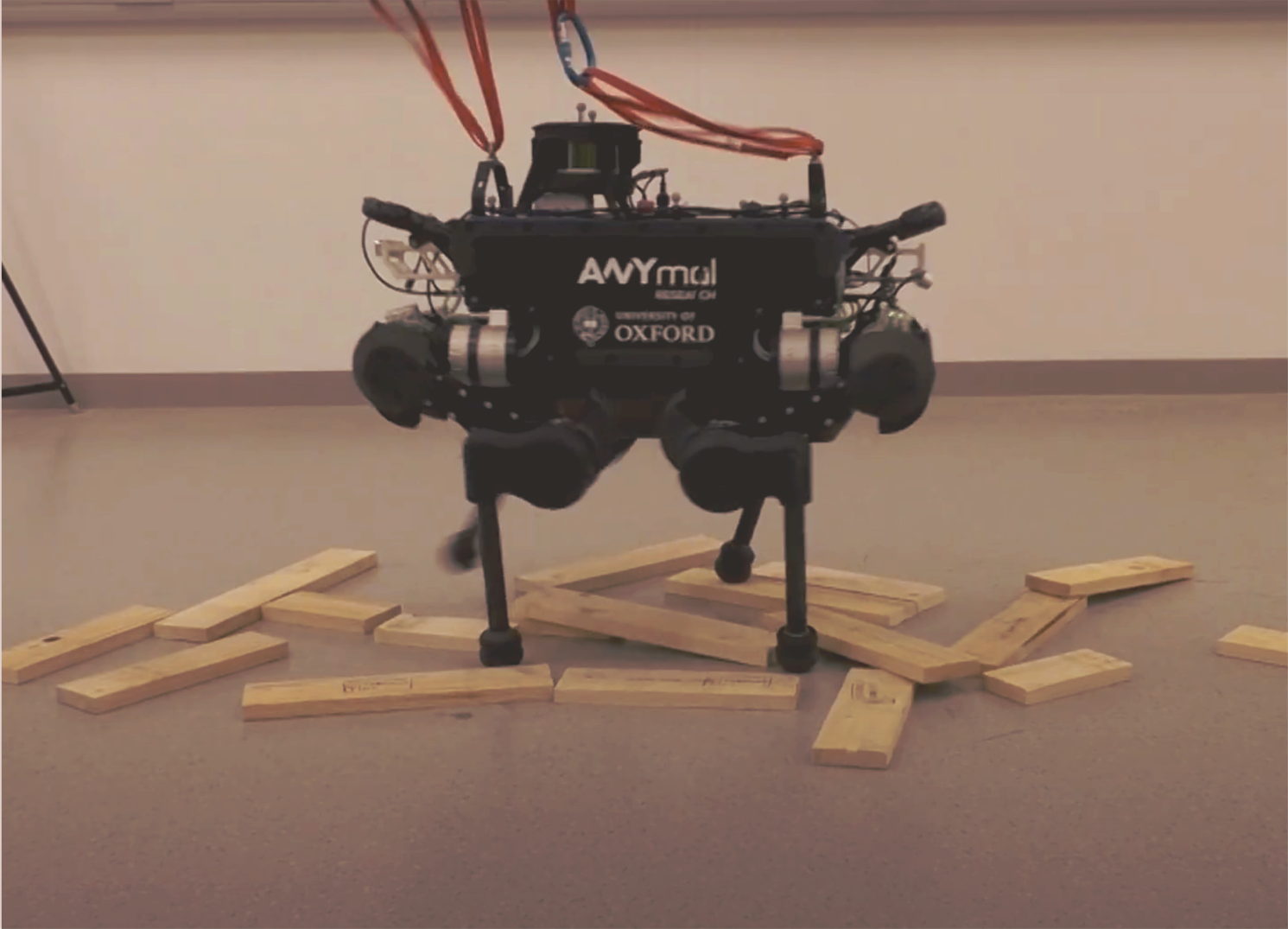
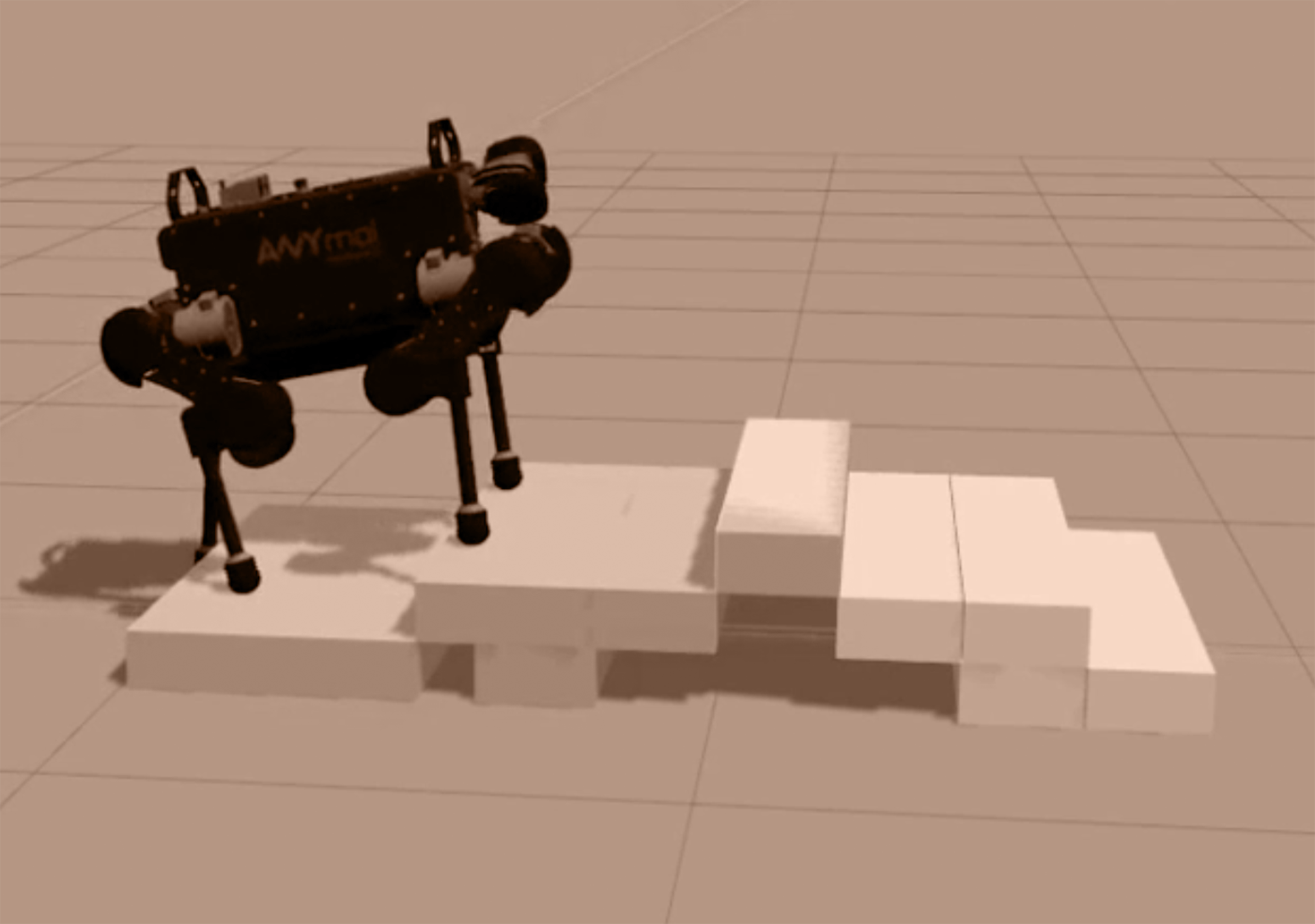
Learning System-Adaptive Legged Robotic Locomotion Policies
Supervisors:
Dr. Ioannis Havoutis and Prof. Ingmar Posner
July 2012 - June 2016
Electronics
Final Year Project:
Micro-controller based Low-Powered
Semi-Autonomous Quadcopter
April 2023 - Present
Research Focus:
Reinforcement Learning for development of complex autonomous agents.
November 2021 - February 2023
Dynamic Robot Systems Group
Research Focus:
Long-Horizon Motion Planning for Legged and Manipulator Robots using
learned system dynamics models.
June 2018 - August 2018
RaiLab
Project:
Learning Platform Adaptive Locomotion Policies
June 2018 - August 2018
Robotics Systems Lab
Project:
Heterogeneous Swarm Optimization using Deep Reinforcement
Learning
Here are some of the projects I have worked on. Feel free to check them out.
I mostly used C for my Embedded Systems projects in which I largely worked on ARM Cortex M based micro-controllers. I used C++ for my Robotics projects and have been using it extensively for my current research.
I consider Python to be a brilliant prototyping tool. I use it extensively for machine learning, especially for training RL agents as part of my research. I then port most of my models to C++ for use with physical hardware.
I do not use MATLAB often but it has been quite a convenient tool for performing basic control optimizations.
I'm familiar with the instruction sets for Intel 8051 and 8086. I used these for some of my embedded systems projects.
Definitely a great library. Was very important in a project where I developed my own shared memory based inter-process communication library.
I have used Eigen in every Robotics C++ project I have worked on.
It has been my go-to Deep Learning framework.
This has been very useful for me to be able to port my models trained in Python to C++ with ease.
I definitely use PyTorch more than I use Tensorflow but I do much of my RL training using Tensorflow based frameworks and hence use it often.
I use baselines for training RL agents using some of the widely used RL algorithms. This is mostly for prototyping after which, in most cases, I use my own implementation of these algorithms.
I first started RL with MuJoCo since it was widely used along with the OpenAI Gym framework.
I also tested PyBullet for training some RL agents. In fact, PyBullet was my first choice when I started training an RL policy for controlling the ANYmal quadruped.
Most RL algorithms have been known to be extremely sample inefficient. To train a feasible RL policy thus necessitates super fast simulators. And that is pretty much why I greatly enjoy using RaiSim. I now use it as the go-to simulator for RL.
I experimented with V-REP for RL. Cannot say I use it a lot. Do like the drag and drop features it supports though.
I use Gazebo with all of my ROS projects. Everything I do on the real robot is first tested using Gazebo.
I'll be glad to connect, discuss and collaborate. This could be related to work or could be about hiking, painting, music, travelling or history. Feel free to shoot me an e-mail.